Copyright © Guangdong Banrin Robot Harmonic Technology Co., Ltd. All Rights Reserved. Site Map
- +86-18038284215+86-13431363788
- cgf@zgbr.net
- Room 504, Building 1, No. 5, Gongye North Fourth Road, Songshan Lake Park, Dongguan City


How to judge the performance of industrial robots? You can judge from performance indicators, which mainly include workspace, degrees of freedom, effective load, motion accuracy, motion characteristics, dynamic characteristics, etc. The following introduces each performance indicator.
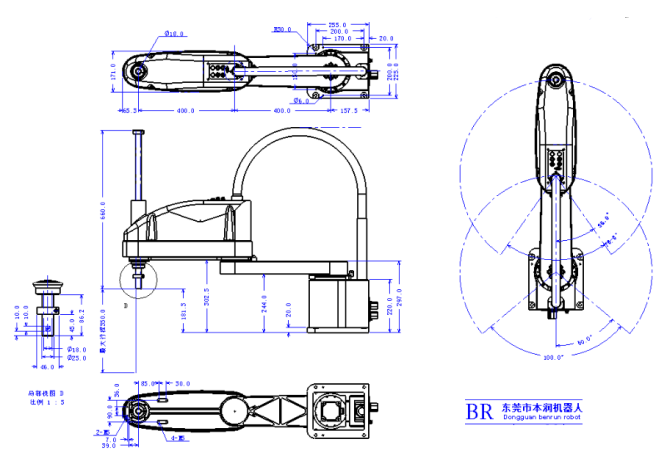
1. Workspace
The workspace refers to the set of positions in space that a specific part of the robot arm can reach under certain conditions. The characteristics and size of the workspace reflect the size of the robot's working ability. When understanding the robot's workspace, pay attention to the following points:

(1) The workspace indicated in the manual of an industrial robot usually refers to the range that the origin of the mechanical interface coordinate system on the wrist can reach in space, that is, the range that the center point of the flange at the end of the wrist can reach in space, rather than the range that the end effector can reach. Therefore, when designing and selecting, attention should be paid to the actual workspace that the robot can reach after installing the end effector.
(2) The workspace provided in the robot manual is often smaller than the maximum space in the kinematic sense. This is because in the accessible space, the effective load, the maximum speed and the maximum acceleration allowed are different when the arm posture is different. The limit value allowed at the maximum position of the arm is usually smaller than that at other positions. In addition, there may be a problem of degree of freedom degradation at the boundary of the robot's maximum accessible space. The posture at this time is called a singular configuration, and the degree of freedom evolution phenomenon will occur in a considerable range around the singular configuration. This part of the workspace cannot be used when the robot is working.
(3) In addition to the edge of the workspace, industrial robots in actual applications may also have areas that the arm end cannot reach due to the limitations of the mechanical structure. This is often called a void or cavity. A cavity refers to a completely enclosed space in the workspace that the arm end cannot reach. The void refers to the space that cannot be reached by the upper arm end along the entire length of the axis.
2. Degree of freedom of movement
The degree of freedom of movement refers to the number of variables required for the robot manipulator to move in space. It is a parameter used to indicate the flexibility of the robot's movements. It is generally expressed in terms of the number of independent movements along the axis and around the axis.
3. Payload
Payload refers to the weight of the object that the robot manipulator can carry or the force or torque that it can withstand when working, which is used to indicate the load capacity of the manipulator.
The maximum allowable transportable mass of the robot is different in different postures, so the rated transportable mass of the robot refers to the maximum mass that can be transported by the wrist joint end when its arm is in any posture in the workspace.
4. Motion accuracy
The accuracy of the robot mechanical system mainly involves posture accuracy, repeated posture accuracy, trajectory accuracy, repeated trajectory accuracy, etc.
Position accuracy refers to the deviation between the command posture and the actual posture center when approaching the command posture from the same direction. Repeated posture accuracy refers to the inconsistency of the actual posture after responding to the same command posture n times from the same direction.
Trajectory accuracy refers to the degree of closeness of the robot mechanical interface to follow the command trajectory n times from the same direction. Trajectory repeatability accuracy refers to the inconsistency between the actual trajectory after following a given trajectory n times in the same direction.
5. Motion characteristics (Sped)
Speed and acceleration are the main indicators of robot motion characteristics. In the manual of industrial robots, the maximum stable speed of the main degrees of freedom of motion is usually provided, but in practical applications, it is not enough to simply consider the maximum stable speed, and attention should also be paid to its maximum allowable acceleration.
6. Dynamic characteristics
The dynamic parameters of dynamic characteristics structure mainly include mass, moment of inertia, stiffness, damping coefficient, natural frequency and vibration mode. For the stiffness of the robot, if the stiffness is poor, the posture accuracy of the robot and the natural frequency of the system will decrease, resulting in dynamic instability of the system, but for some operations (such as assembly operations), it is beneficial to increase the flexibility appropriately. The ideal situation is to hope that the stiffness of the robot arm is adjustable. Increasing the damping of the system is beneficial to shorten the decay time of the oscillation and improve the dynamic stability of the system. Increasing the natural frequency of the system and avoiding the working frequency range are also beneficial to improve the stability of the system.
